Ejemplo 4. Diseño de compensador de atraso por el método del lugar geométrico de las raíces
Tema complementario: Diseño de compensador de atraso por el método de lugar geométrico de las raíces
1. Requerimientos
- Tener conocimiento previo respecto al método del lugar geométrico de las raíces.
- Tener un programa que permita realizar el root locus.
- Tener un programa que permita realizar el transitorio de un sistema por medio de diagrama de bloques.
- Tener un programa para simular circuitos.
2. Las ecuaciones de diseño que se usara en este ejemplo son las siguientes:
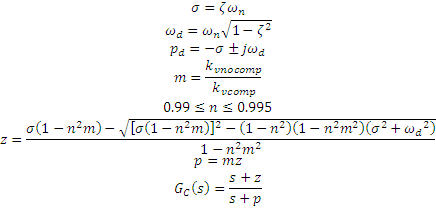 Ecuaciones de comprobación:
Ecuaciones de comprobación:
 3. Por último recordar que el objetivo de agregar un compensador de atraso a un determinado sistema es mejorar la respuesta en estado estacionario de dicho sistema sin afectar la posición de los polos dominantes.
3. Por último recordar que el objetivo de agregar un compensador de atraso a un determinado sistema es mejorar la respuesta en estado estacionario de dicho sistema sin afectar la posición de los polos dominantes.
Descarga la simulación en proteus 7.9 de Ejemplo 4 Diseño de compensador de atraso por el método de lugar geométrico de las raíces aquí.
Descarga la simulación en proteus 8.3 de Ejemplo 4 Diseño de compensador de atraso por el método de lugar geométrico de las raíces aquí.
Ejemplo 4. Se tiene la siguiente función de transferencia de una planta:
 Se desea que el comportamiento del sistema en lazo cerrado para una señal de entrada rampa 3t tenga las siguientes características:
Se desea que el comportamiento del sistema en lazo cerrado para una señal de entrada rampa 3t tenga las siguientes características:
 Diseñe el compensador de atraso y verifique los resultados. Además de esto realice el circuito del sistema.
Diseñe el compensador de atraso y verifique los resultados. Además de esto realice el circuito del sistema.
Solución. En lazo cerrado la planta tiene la siguiente ecuación característica:
 Se tienen las siguientes igualdades:
Se tienen las siguientes igualdades:
 Resolviendo se tiene:
Resolviendo se tiene:
 Con el valor de la ωn y de ζ hallamos los valores de σ y ωd. Hallamos el valor del factor de atenuación σ:
Con el valor de la ωn y de ζ hallamos los valores de σ y ωd. Hallamos el valor del factor de atenuación σ:
 Y ahora hallamos el valor de la frecuencia natural amortiguada:
Y ahora hallamos el valor de la frecuencia natural amortiguada:
 Es decir que los polos dominantes están ubicados en:
Es decir que los polos dominantes están ubicados en:
 El valor de la constante de velocidad kv del sistema no compensado es 1.851. Hallamos el valor de la constante m:
El valor de la constante de velocidad kv del sistema no compensado es 1.851. Hallamos el valor de la constante m:
 Se elige n de un valor de 0.995 (el valor de n debe estar en tre 0.99 y 0.995). Hallamos el valor de z:
Se elige n de un valor de 0.995 (el valor de n debe estar en tre 0.99 y 0.995). Hallamos el valor de z:
 Hallamos ahora el valor de p:
Hallamos ahora el valor de p:
 La función de transferencia del compensador queda de la siguiente manera:
La función de transferencia del compensador queda de la siguiente manera:
 Verificamos el ángulo del compensador:
Verificamos el ángulo del compensador:
 Se comprueba que el ángulo es correcto. Y por ultimo verificamos la magnitud del compensador:
Se comprueba que el ángulo es correcto. Y por ultimo verificamos la magnitud del compensador:
 Se confirma que la magnitud del compensador tiene un valor cercano a uno.
Se confirma que la magnitud del compensador tiene un valor cercano a uno.
Tabla comparativa
 Diseño circuito.
Diseño circuito.
El diagrama de bloques de la planta es el siguiente:
 Se usaran dos circuitos inversores de fase: un amplificador integrador y un filtro pasa bajos MFB:
Se usaran dos circuitos inversores de fase: un amplificador integrador y un filtro pasa bajos MFB:
 El diagrama de bloques del compensador es el siguiente:
El diagrama de bloques del compensador es el siguiente:
 Se usara el circuito del compensador de adelanto no inversor:
Se usara el circuito del compensador de adelanto no inversor:
 El diagrama de bloques del sistema completo es el siguiente:
El diagrama de bloques del sistema completo es el siguiente:
 Y finalmente el circuito completo queda de la siguiente manera:
Y finalmente el circuito completo queda de la siguiente manera:
 Se usan cuatro amplificadores operacionales: uno para el amplificador restador, uno para el compensador y dos para la planta de tercer orden.
Se usan cuatro amplificadores operacionales: uno para el amplificador restador, uno para el compensador y dos para la planta de tercer orden.
Temas relacionados
Comentarios
Publicar un comentario