Ejemplo 4. Diseño de compensador de adelanto por el método del lugar geométrico de las raíces
Tema complementario: Diseño de compensador en adelanto por el método de lugar geométrico de las raíces
1. Requerimientos
- Tener conocimiento previo respecto al método del lugar geométrico de las raíces.
- Tener un programa que permita realizar el root locus.
- Tener un programa que permita realizar el transitorio de un sistema por medio de diagrama de bloques.
- Tener un programa para simular circuitos.
2. Las ecuaciones de diseño que se usaran en este ejemplo son las siguientes:
 Estas ecuaciones corresponden al método de la bisectriz.
Estas ecuaciones corresponden al método de la bisectriz.
3. Por último recordar que el objetivo de agregar un compensador de adelanto a un determinado sistema es mejorar el transitorio de dicho sistema, específicamente aumentar la frecuencia natural y en algunos casos cambiar el factor de amortiguamiento.
Descarga la simulación en proteus 7.9 de Ejemplo 4 Diseño de compensador de adelanto por el método de lugar geométrico de las raíces aquí.
Descarga la simulación en proteus 8.3 de Ejemplo 4 Diseño de compensador de adelanto por el método de lugar geométrico de las raíces aquí.
Ejemplo 4. Se tiene la siguiente función de transferencia de una planta:
 Se desea que el comportamiento del sistema en lazo cerrado tenga las siguientes características:
Se desea que el comportamiento del sistema en lazo cerrado tenga las siguientes características:
 Realice el diseño del compensador y verifique los resultados. Además realice el diseño del circuito del sistema.
Realice el diseño del compensador y verifique los resultados. Además realice el diseño del circuito del sistema.
Solución. Hallamos el valor del factor de atenuación σ:
 Hallamos el valor de la frecuencia natural amortiguada ωd:
Hallamos el valor de la frecuencia natural amortiguada ωd:
 Entonces los polos deseados están ubicados en:
Entonces los polos deseados están ubicados en:
 Hallamos la magnitud y la fase de la planta evaluada en el polo pd:
Hallamos la magnitud y la fase de la planta evaluada en el polo pd:
 Se tiene entonces que la magnitud y la fase de la planta evaluada en el polo pd es:
Se tiene entonces que la magnitud y la fase de la planta evaluada en el polo pd es:
 Se procede ahora a hallar los valores de los parámetros del compensador. Hallamos el valor de z:
Se procede ahora a hallar los valores de los parámetros del compensador. Hallamos el valor de z:
 Hallamos el valor de p:
Hallamos el valor de p:
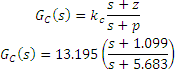
 Y Hallamos el valor de la ganancia del compensador kc:
Y Hallamos el valor de la ganancia del compensador kc:


El diagrama de bloques de la planta es el siguiente:
 Se usaran tres circuitos: dos amplificadores integradores (fases inversas) y un filtro pasa bajos de primer orden rc no inversor:
Se usaran tres circuitos: dos amplificadores integradores (fases inversas) y un filtro pasa bajos de primer orden rc no inversor:
 El diagrama de bloques del compensador es el siguiente:
El diagrama de bloques del compensador es el siguiente:
 Se usara el circuito del compensador de adelanto no inversor:
Se usara el circuito del compensador de adelanto no inversor:
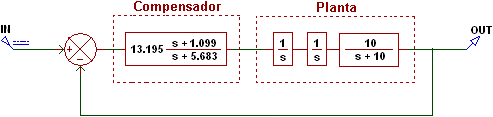
 El diagrama de bloques del sistema completo es el siguiente:
El diagrama de bloques del sistema completo es el siguiente:
 Y finalmente el circuito completo queda de la siguiente manera:
Y finalmente el circuito completo queda de la siguiente manera:
 Se usaron 5 amplificadores operacionales: uno para el amplificador restador, uno para el compensador de adelanto y tres para la planta.
Se usaron 5 amplificadores operacionales: uno para el amplificador restador, uno para el compensador de adelanto y tres para la planta.
Temas relacionados
Comentarios
Publicar un comentario